UAV Swarm Formation System
Uses ROS/PX4 and Prometheus for distributed intelligent formation. It supports line, triangle, rectangle, and circle formations, indoor and outdoor positioning, simulation, safety protection, interaction, and open APIs.
AMOVLAB Solution
A complete laboratory construction program built around progressive training, full-stack coverage, and industry-university-research integration.
The solution serves vocational colleges, undergraduate programs, and graduate research teams. It builds a lifecycle teaching and research system from UAV fundamentals and single-aircraft control to advanced functions, swarm intelligence, and industry applications.

Solution Overview
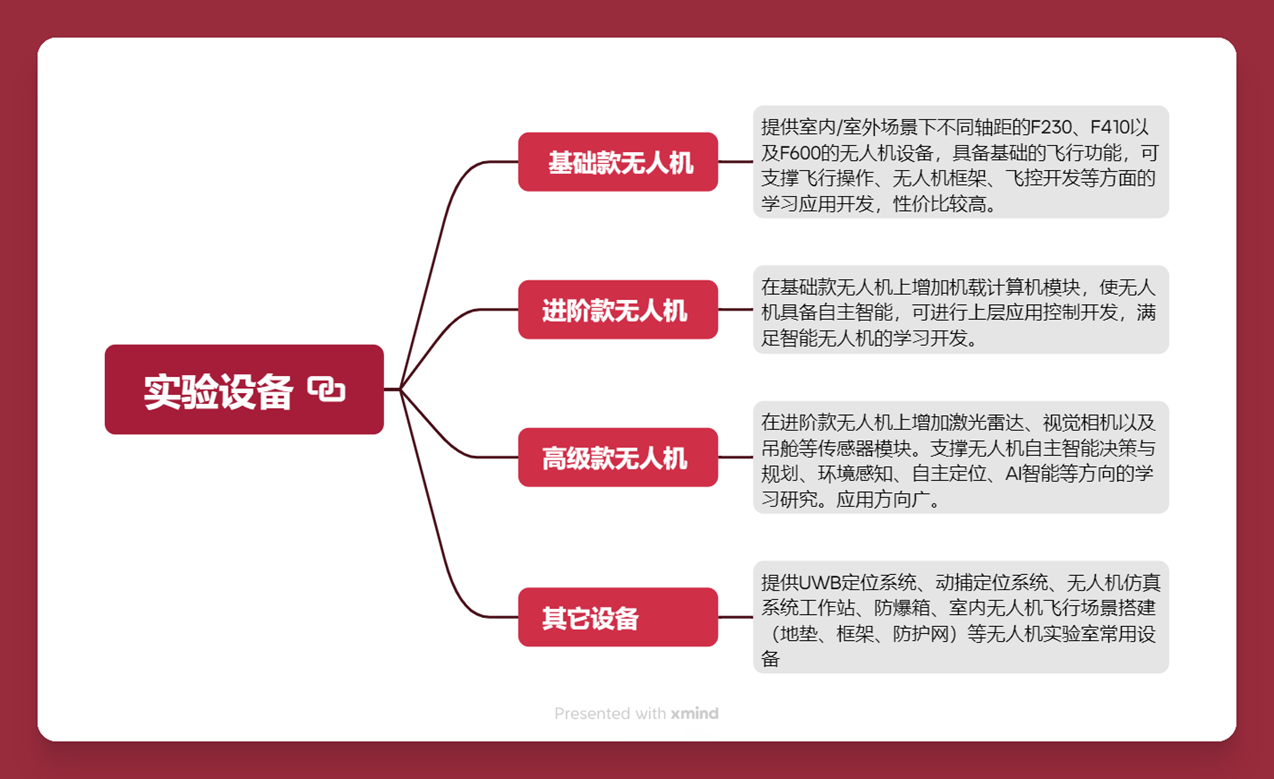
The program includes curriculum systems, experimental equipment, simulation platforms, research solutions, and supporting training services. It helps universities connect foundation courses, practical experiments, research projects, competitions, graduation projects, academic papers, and industry implementation.
AMOVLAB designs the laboratory around real engineering workflows, so students and researchers can move from simulation verification to physical deployment while using the same development stack and research ecosystem.
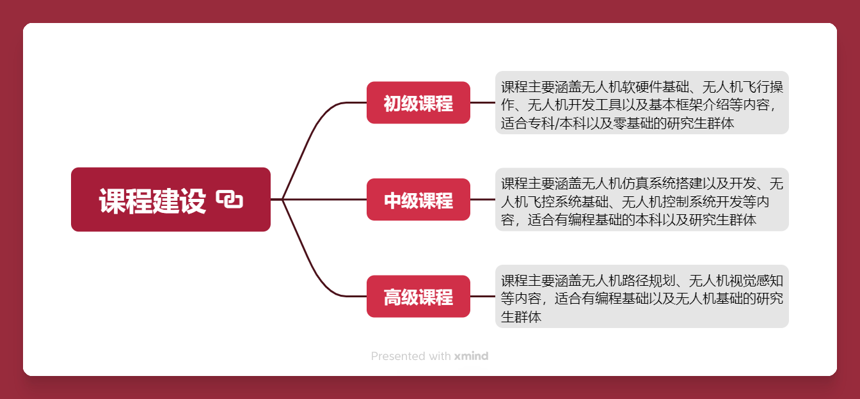
Solution Structure
The curriculum is divided into beginner, intermediate, and advanced stages, covering the complete process from system entry to advanced algorithm development.


Multi-Scenario Research Solutions
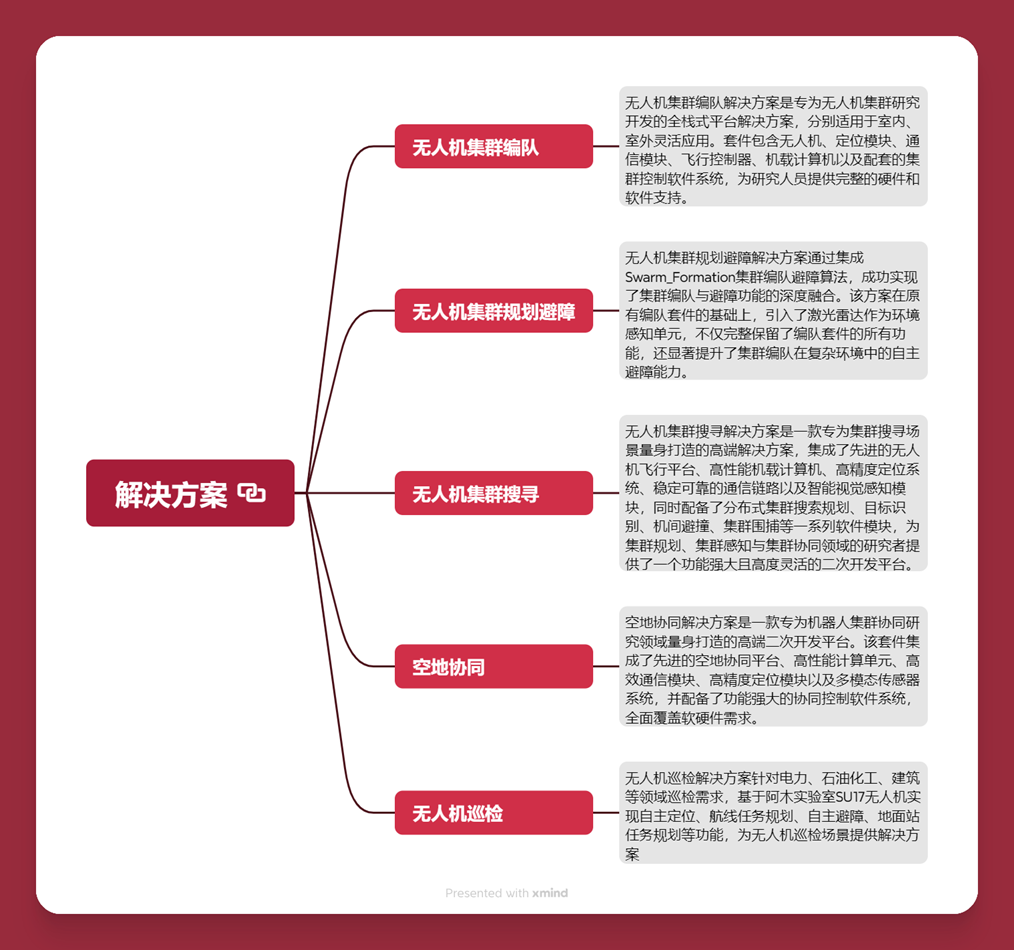
Uses ROS/PX4 and Prometheus for distributed intelligent formation. It supports line, triangle, rectangle, and circle formations, indoor and outdoor positioning, simulation, safety protection, interaction, and open APIs.
Combines the SwarmFormation algorithm with LiDAR perception to support formation keeping, dynamic obstacle avoidance, real-time map building, and formation path correction.
Integrates MPC control and visual recognition for distributed area search, inter-aircraft collision avoidance, target recognition, and coordinated swarm pursuit.
Enables UAVs to identify and lock QR-code targets in the air, then transmit position data to ground vehicles for autonomous navigation and obstacle avoidance. ROS/Gazebo simulation and open code are supported.
Based on AMOVLAB's SU17 UAV platform, integrating four-camera SLAM, LiDAR, gimbal payloads, and AI perception for power, construction, petrochemical, and other automated inspection tasks.
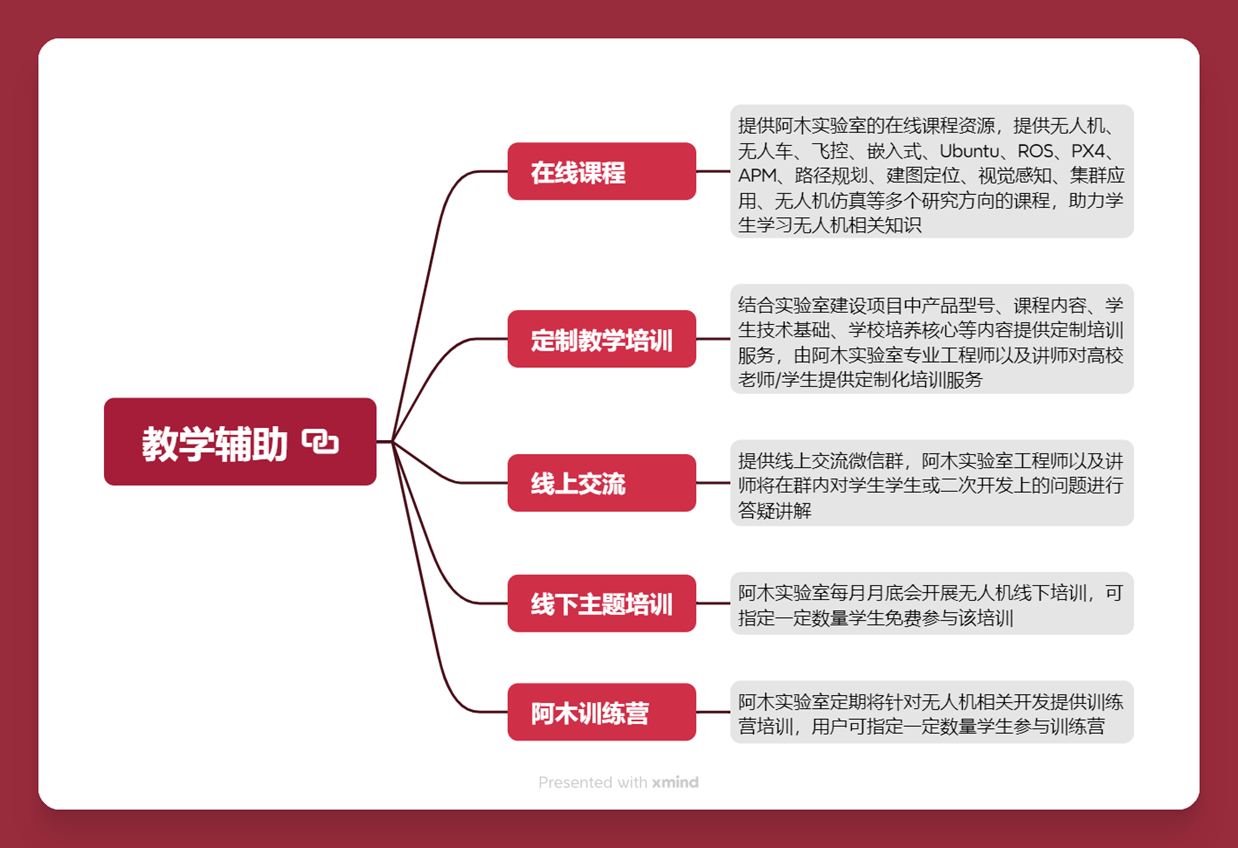
Teaching and Training Support
AMOVLAB provides online courses, customized teaching, offline practical training, and technical support to help universities advance teaching and research tasks while helping students master UAV knowledge, development skills, and frontier technology applications.
Open Ecosystem Support
AMOVLAB relies on four open-source projects, Prometheus, FMT, SpireCV, and KKSwarm, to build an ecosystem covering control, planning, vision, and swarm intelligence. Combined with supporting courses and dedicated training, it creates a full-chain learning system from entry to research.
The ecosystem also includes technical forums and active communities where more than 10,000 developers accumulate knowledge, exchange ideas, and collaborate on robotics and UAV development.
Contact Us
A lab plan needs to balance equipment, courses, experiment difficulty, and future research expansion.
Useful details to include
感谢您订阅
This email has been registered!


